Customer Service 052 866 9968
Free shipping on All Orders above 500 AED.

















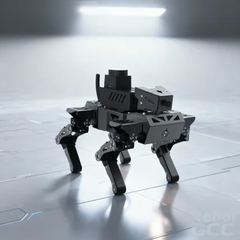











ROS SLAM Corgi Robot Platform – LiDAR, Camera, IMU, ESP32 Control | Real-Time Mapping & Navigation | ROS1/ROS2, Python, C++ Compatible | Wi-Fi Control, RViz, Gazebo | Ideal for AI, SLAM, STEM Robotics Education
The ROS SLAM Corgi is a professional robotics learning platform that integrates LiDAR, IMU, ESP32 microcontroller, and...
Disponibilité:
En rupture de stock
Model: ROS SLAM Corgi
Type: L4 ROS & Research Robots
- Dhs. 7,777.00
- Dhs. 7,777.00
- Prix unitaire
- par
S'il vous plaît, dépêchez-vous ! 0 laissé en stock
Limited-Time Offers, End in:
151D
8H
23M
0S
Total:
Dhs. 7,777.00
10 les clients regardent ce produit
Impossible de charger la disponibilité du ramassage
Free Shipping
Free standard shipping on orders over 500 AED

Description
xThe ROS SLAM Corgi is a professional robotics learning platform that integrates LiDAR, IMU, ESP32 microcontroller, and an HD camera for real-time SLAM (Simultaneous Localization and Mapping), autonomous navigation, and AI-based visual recognition. Designed to teach robotics, AI, and control systems, it provides a practical gateway to mastering the Robot Operating System (ROS1/ROS2) used in modern autonomous robots.
The robot combines mechanical precision with modular expandability. Its 360° LiDAR sensor enables real-time mapping and environment perception, while the onboard IMU ensures accurate motion tracking and orientation estimation. The ESP32 control board manages low-level actuation and data acquisition, bridging communication between the ROS host computer and hardware peripherals. Students can visualize mapping and navigation processes directly through RViz and simulate motion planning using Gazebo, replicating real-world robotic tasks virtually before field deployment.
The built-in HD camera supports OpenCV-based image recognition, line tracking, and object detection. This allows learners to explore advanced concepts like sensor fusion, AI decision-making, and autonomous path planning. The open-source ROS environment gives access to standard packages such as gmapping, navigation, move_base, and slam_toolbox, ensuring full compatibility with existing ROS workflows.
Its modular structure simplifies setup—no soldering is required. Each module connects via labeled ports, making assembly and troubleshooting intuitive. The chassis is constructed with lightweight aluminum alloy and high-precision motors, offering stability and durability for research and classroom use alike. The robot’s software stack is optimized for Ubuntu and ROS, and includes Python/C++ examples demonstrating topics like sensor data streaming, map building, PID control, and AI tracking algorithms.
With Wi-Fi connectivity, the Corgi robot can be controlled remotely using a laptop or mobile interface. Users can record logs, test SLAM parameters, and evaluate localization accuracy in real time. The robot serves as both a teaching tool and a research-grade experimental platform, allowing engineering students and developers to learn real-world robotics programming, mapping techniques, and system integration.
The ROS SLAM Corgi bridges the gap between theory and practice—offering a tangible, visual experience of robotic intelligence, mapping, and navigation. It is ideal for STEM education, AI labs, research institutes, and university robotics competitions, helping learners understand the complete cycle of sensing, mapping, and intelligent movement.
1️⃣ ROS-Based SLAM & Navigation System
Built around the open-source ROS framework, the Corgi robot provides a full SLAM pipeline—sensor acquisition, data fusion, map generation, and autonomous navigation. Learners can experiment with gmapping, Hector SLAM, and Cartographer, analyzing localization accuracy and map fidelity. Real-time updates in RViz and Gazebo deliver hands-on visualization of robotic mapping, making this platform ideal for mastering real-world navigation algorithms.
2️⃣ Integrated LiDAR, IMU, and Camera Sensors
A 360° LiDAR sensor scans the surroundings, while the IMU tracks tilt and acceleration. Combined with the HD camera, these sensors form a complete perception suite for robotics experiments. Students can study how sensor fusion enhances SLAM precision, explore obstacle detection logic, and implement multi-sensor mapping and tracking with ROS message topics and TF transforms.
3️⃣ Python & C++ Coding for Robotics Learning
The Corgi robot is fully programmable using Python and C++. The included tutorials teach message publishing/subscribing, action servers, and navigation stack tuning. Users can deploy OpenCV for image recognition or PySerial for ESP32 communication, gaining real coding experience aligned with industrial robotics practices. It’s ideal for students transitioning from Arduino to full ROS robotics programming.
4️⃣ Modular, Solder-Free Assembly for Education
The mechanical and electrical design is modular—plug-and-play components make assembly quick and educational. Clear documentation and pre-configured firmware reduce setup time. Teachers can run 45–90 minute sessions covering mapping, path planning, and AI vision without hardware complexity. This accelerates learning in classrooms, research labs, and workshops.
5️⃣ Wi-Fi Remote Control, Simulation & Research Flexibility
Through Wi-Fi, users can teleoperate the robot, monitor sensor data, and adjust navigation parameters remotely. Integration with Gazebo simulation provides a safe environment for testing before physical trials. The robot supports multi-robot coordination, real-time monitoring, and experiment reproducibility, making it a complete research tool for robotics and AI innovation.
ROS robot, SLAM robot, AI vision, LiDAR mapping, autonomous navigation, IMU sensor fusion, ESP32 control board, Python C++ coding, RViz visualization, Gazebo simulation, ROS1 ROS2 compatible, robotics education, STEM robot platform, AI research kit, mapping robot, navigation algorithms, sensor integration, object detection, Wi-Fi robot control, machine vision training, robotics lab tool, path planning, open source ROS, motion tracking, AI learning robot, robotics engineering, autonomous driving robot, visual SLAM demo, mobile robot kit, university research robot.
Shipping & Return
xReturns Policy
You may return most new, unopened items within 30 days of delivery for a full refund. We'll also pay the return shipping costs if the return is a result of our error (you received an incorrect or defective item, etc.).
You should expect to receive your refund within four weeks of giving your package to the return shipper, however, in many cases you will receive a refund more quickly. This time period includes the transit time for us to receive your return from the shipper (5 to 10 business days), the time it takes us to process your return once we receive it (3 to 5 business days), and the time it takes your bank to process our refund request (5 to 10 business days).
If you need to return an item, simply login to your account, view the order using the "Complete Orders" link under the My Account menu and click the Return Item(s) button. We'll notify you via e-mail of your refund once we've received and processed the returned item.
Shipping
We can ship to virtually any address within UAE. Note that there are restrictions on some products, and some products cannot be shipped to international destinations.
When you place an order, we will estimate shipping and delivery dates for you based on the availability of your items and the shipping options you choose. Depending on the shipping provider you choose, shipping date estimates may appear on the shipping quotes page.
Related Products
Fournisseur: Fournisseur
- Dhs. 7,777.00
- Dhs. 7,777.00
- Prix unitaire
- par
Fournisseur: Fournisseur
- Dhs. 7,777.00
- Dhs. 7,777.00
- Prix unitaire
- par
Fournisseur: Fournisseur
- Dhs. 7,777.00
- Dhs. 7,777.00
- Prix unitaire
- par
Fournisseur: Fournisseur
- Dhs. 7,777.00
- Dhs. 7,777.00
- Prix unitaire
- par
Fournisseur: Fournisseur
- Dhs. 7,777.00
- Dhs. 7,777.00
- Prix unitaire
- par
Fournisseur: Fournisseur
- Dhs. 7,777.00
- Dhs. 7,777.00
- Prix unitaire
- par
Fournisseur: Fournisseur
- Dhs. 7,777.00
- Dhs. 7,777.00
- Prix unitaire
- par
Fournisseur: Fournisseur
- Dhs. 7,777.00
- Dhs. 7,777.00
- Prix unitaire
- par
Fournisseur: Fournisseur
- Dhs. 7,777.00
- Dhs. 7,777.00
- Prix unitaire
- par
Fournisseur: Fournisseur
- Dhs. 7,777.00
- Dhs. 7,777.00
- Prix unitaire
- par
Recently Viewed Products
Fournisseur: Fournisseur
- Dhs. 7,777.00
- Dhs. 7,777.00
- Prix unitaire
- par
Fournisseur: Fournisseur
- Dhs. 7,777.00
- Dhs. 7,777.00
- Prix unitaire
- par
Fournisseur: Fournisseur
- Dhs. 7,777.00
- Dhs. 7,777.00
- Prix unitaire
- par
Fournisseur: Fournisseur
- Dhs. 7,777.00
- Dhs. 7,777.00
- Prix unitaire
- par
Fournisseur: Fournisseur
- Dhs. 7,777.00
- Dhs. 7,777.00
- Prix unitaire
- par
Fournisseur: Fournisseur
- Dhs. 7,777.00
- Dhs. 7,777.00
- Prix unitaire
- par
Fournisseur: Fournisseur
- Dhs. 7,777.00
- Dhs. 7,777.00
- Prix unitaire
- par
Fournisseur: Fournisseur
- Dhs. 7,777.00
- Dhs. 7,777.00
- Prix unitaire
- par
Fournisseur: Fournisseur
- Dhs. 7,777.00
- Dhs. 7,777.00
- Prix unitaire
- par
Fournisseur: Fournisseur
- Dhs. 7,777.00
- Dhs. 7,777.00
- Prix unitaire
- par
- Le choix d’une sélection entraîne une actualisation complète de la page.