خدمة العملاء 052 866 9968
شحن مجاني لجميع الطلبات التي تزيد عن 500 درهم إماراتي.

















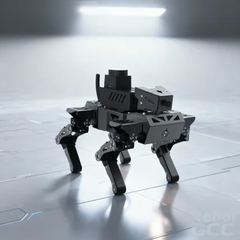











ROS SLAM Corgi Robot Platform – LiDAR, Camera, IMU, ESP32 Control | Real-Time Mapping & Navigation | ROS1/ROS2, Python, C++ Compatible | Wi-Fi Control, RViz, Gazebo | Ideal for AI, SLAM, STEM Robotics Education
ROS SLAM Corgi هي منصة احترافية لتعليم الروبوتات، تجمع بين تقنية LiDAR، ووحدة قياس القصور الذاتي (IMU)،...
التوفر:
إنتهى من المخزن
Model: روس سلام كورجي
Type: L4 ROS & Research Robots
- Dhs. 7,777.00
- Dhs. 7,777.00
- سعر الوحدة
- لكل
من فضلك اسرع! 0 تركت في المخزون
عروض لفترة محدودة، تنتهي في:
151D
8H
23M
0S
المجموع الفرعي:
Dhs. 7,777.00
10 العملاء يشاهدون هذا المنتج
تعذر تحميل مدى توفر الطلب
ًالشحن مجانا
شحن قياسي مجاني للطلبات التي تزيد عن 500 درهم إماراتي

وصف
xROS SLAM Corgi هي منصة احترافية لتعليم الروبوتات، تجمع بين تقنية LiDAR، ووحدة قياس القصور الذاتي (IMU)، ووحدة التحكم الدقيقة ESP32، وكاميرا عالية الدقة، لتوفير تحديد المواقع ورسم الخرائط المتزامنة (SLAM) في الوقت الفعلي، والملاحة الذاتية، والتعرف البصري القائم على الذكاء الاصطناعي. صُممت هذه المنصة لتعليم الروبوتات والذكاء الاصطناعي وأنظمة التحكم، وتوفر مدخلاً عمليًا لإتقان نظام تشغيل الروبوت (ROS1/ROS2) المستخدم في الروبوتات الحديثة ذاتية التشغيل.
يجمع الروبوت بين الدقة الميكانيكية وقابلية التوسع المعياري. يُمكّن مستشعر LiDAR بزاوية 360 درجة رسم الخرائط وإدراك البيئة في الوقت الفعلي، بينما تضمن وحدة IMU المدمجة تتبعًا دقيقًا للحركة وتقديرًا دقيقًا للاتجاه. تُدير لوحة التحكم ESP32 عمليات التشغيل منخفضة المستوى وجمع البيانات، مما يُسهم في ربط الاتصال بين حاسوب ROS المُضيف والأجهزة الطرفية. يُمكن للطلاب تصوّر عمليات رسم الخرائط والملاحة مباشرةً من خلال RViz ومحاكاة تخطيط الحركة باستخدام Gazebo، مما يُحاكي مهام الروبوتات الواقعية افتراضيًا قبل النشر الميداني.
تدعم الكاميرا عالية الدقة المدمجة التعرف على الصور وتتبع الخطوط والكشف عن الكائنات باستخدام OpenCV. يتيح هذا للمتعلمين استكشاف مفاهيم متقدمة مثل دمج المستشعرات، واتخاذ القرارات بالذكاء الاصطناعي، وتخطيط المسارات تلقائيًا. تتيح بيئة ROS مفتوحة المصدر الوصول إلى حزم قياسية مثل gmapping وnavigation وmove_base وslam_toolbox، مما يضمن التوافق التام مع سير عمل ROS الحالية.
هيكله المعياري يُبسط عملية الإعداد، فلا حاجة للحام. تتصل كل وحدة عبر منافذ مُسمّاة، مما يجعل التجميع واستكشاف الأخطاء وإصلاحها سهلاً. الهيكل مصنوع من سبيكة ألومنيوم خفيفة الوزن ومحركات عالية الدقة، مما يوفر الثبات والمتانة للاستخدام في الأبحاث والفصول الدراسية على حد سواء. حزمة برامج الروبوت مُحسّنة لنظامي التشغيل Ubuntu وROS، وتتضمن أمثلة بلغة Python/C++ توضح مواضيع مثل تدفق بيانات المستشعرات، وبناء الخرائط، والتحكم في PID، وخوارزميات تتبع الذكاء الاصطناعي.
بفضل اتصال واي فاي، يُمكن التحكم في روبوت كورجي عن بُعد باستخدام جهاز كمبيوتر محمول أو واجهة هاتف محمول. يُمكن للمستخدمين تسجيل السجلات، واختبار معلمات SLAM، وتقييم دقة تحديد المواقع آنيًا. يُمثل الروبوت أداة تعليمية ومنصة تجريبية بحثية، مما يُتيح لطلاب الهندسة والمطورين تعلم برمجة الروبوتات في العالم الواقعي، وتقنيات رسم الخرائط، وتكامل الأنظمة.
يُجسّد ROS SLAM Corgi الفجوة بين النظرية والتطبيق، مُقدّمًا تجربة بصرية ملموسة للذكاء الروبوتي، ورسم الخرائط، والملاحة. وهو مثالي لتعليم العلوم والتكنولوجيا والهندسة والرياضيات، ومختبرات الذكاء الاصطناعي، ومعاهد الأبحاث، ومسابقات الروبوتات الجامعية، مُساعدًا المتعلمين على فهم الدورة الكاملة للاستشعار، ورسم الخرائط، والحركة الذكية.
1️⃣ نظام الملاحة SLAM القائم على ROS
بُني روبوت كورجي استنادًا إلى إطار عمل ROS مفتوح المصدر، وهو يوفر نظامًا متكاملًا لـ SLAM، يشمل التقاط المستشعرات، ودمج البيانات، وإنشاء الخرائط، والملاحة الذاتية. يمكن للمتدربين تجربة gmapping وHector SLAM وCartographer، وتحليل دقة تحديد المواقع ودقة الخرائط. تُتيح التحديثات الفورية في RViz وGazebo تصورًا عمليًا لرسم الخرائط الروبوتية، مما يجعل هذه المنصة مثالية لإتقان خوارزميات الملاحة الواقعية.
2️⃣ أجهزة استشعار LiDAR وIMU والكاميرا المتكاملة
يقوم مستشعر LiDAR بزاوية 360 درجة بمسح البيئة المحيطة، بينما تتتبع وحدة IMU الميل والتسارع. تُشكل هذه المستشعرات، إلى جانب الكاميرا عالية الدقة، مجموعة إدراك متكاملة لتجارب الروبوتات. يمكن للطلاب دراسة كيفية تعزيز دمج المستشعرات لدقة SLAM، واستكشاف منطق اكتشاف العوائق، وتطبيق رسم الخرائط والتتبع متعدد المستشعرات باستخدام مواضيع رسائل ROS وتحويلات TF.
3️⃣ برمجة Python وC++ لتعلم الروبوتات
روبوت كورجي قابل للبرمجة بالكامل باستخدام بايثون و++C. تُعلّم الدروس التعليمية المُضمنة نشر الرسائل والاشتراك فيها، وخوادم الإجراءات، وضبط مكدس التنقل. يُمكن للمستخدمين استخدام OpenCV للتعرف على الصور أو PySerial لاتصالات ESP32، مما يُكسبهم خبرة برمجة حقيقية تتوافق مع ممارسات الروبوتات الصناعية. يُعدّ هذا الروبوت مثاليًا للطلاب الذين ينتقلون من برمجة Arduino إلى برمجة روبوتات ROS الكاملة.
4️⃣ تجميع معياري خالٍ من اللحام للتعليم
التصميم الميكانيكي والكهربائي معياري، حيث تجعل مكونات التوصيل والتشغيل التجميع سريعًا وفعالًا. تُقلل الوثائق الواضحة والبرامج الثابتة المُهيأة مسبقًا من وقت الإعداد. يمكن للمعلمين إدارة جلسات تتراوح مدتها بين 45 و90 دقيقة، تغطي رسم الخرائط وتخطيط المسارات ورؤية الذكاء الاصطناعي دون تعقيدات الأجهزة. وهذا يُسرّع عملية التعلم في الفصول الدراسية ومختبرات الأبحاث وورش العمل.
5️⃣ التحكم عن بعد عبر شبكة Wi-Fi، والمحاكاة، ومرونة البحث
عبر شبكة واي فاي، يُمكن للمستخدمين تشغيل الروبوت عن بُعد، ومراقبة بيانات المستشعر، وضبط إعدادات الملاحة. يوفر التكامل مع محاكاة Gazebo بيئة آمنة للاختبار قبل التجارب العملية. يدعم الروبوت التنسيق بين الروبوتات المتعددة، والمراقبة الآنية، وإمكانية تكرار التجارب، مما يجعله أداة بحث متكاملة في مجال الروبوتات وابتكارات الذكاء الاصطناعي.
روبوت ROS، روبوت SLAM، رؤية الذكاء الاصطناعي، رسم خرائط LiDAR، الملاحة المستقلة، دمج مستشعر IMU، لوحة التحكم ESP32، برمجة Python C++، تصور RViz، محاكاة Gazebo، ROS1 متوافق مع ROS2، تعليم الروبوتات، منصة روبوت STEM، مجموعة أبحاث الذكاء الاصطناعي، روبوت رسم الخرائط، خوارزميات الملاحة، تكامل المستشعر، اكتشاف الكائنات، التحكم في روبوت Wi-Fi، تدريب الرؤية الآلية، أداة مختبر الروبوتات، تخطيط المسار، ROS مفتوح المصدر، تتبع الحركة، روبوت التعلم بالذكاء الاصطناعي، هندسة الروبوتات، روبوت القيادة المستقلة، عرض توضيحي مرئي لـ SLAM، مجموعة روبوت متنقل، روبوت بحث جامعي.
الشحن والإرجاع
xسياسة الإرجاع
يمكنك إرجاع معظم المنتجات الجديدة غير المفتوحة خلال 30 يومًا من تاريخ التسليم لاسترداد كامل المبلغ. سنتكفل أيضًا بتكاليف شحن الإرجاع إذا كان الإرجاع ناتجًا عن خطأ من جانبنا (مثل استلام منتج غير صحيح أو معيب، إلخ).
من المتوقع استلام المبلغ المسترد خلال أربعة أسابيع من تسليم الطرد لشركة الشحن، ولكن في كثير من الحالات، سيصلك المبلغ المسترد بسرعة أكبر. تشمل هذه الفترة وقت النقل اللازم لاستلام الطرد من شركة الشحن (من 5 إلى 10 أيام عمل)، والوقت الذي تستغرقه معالجة طلب الاسترداد بعد استلامه (من 3 إلى 5 أيام عمل)، والوقت الذي يستغرقه بنكك لمعالجة طلب الاسترداد (من 5 إلى 10 أيام عمل).
إذا كنت ترغب في إرجاع منتج، فما عليك سوى تسجيل الدخول إلى حسابك، وعرض الطلب باستخدام رابط "إكمال الطلبات" ضمن قائمة "حسابي"، ثم النقر على زر "إرجاع المنتج/المنتجات". سنُخطرك عبر البريد الإلكتروني باسترداد أموالك بعد استلام المنتج المُعاد ومعالجته.
شحن
يمكننا الشحن إلى أي عنوان تقريبًا داخل الإمارات العربية المتحدة. يُرجى العلم بوجود قيود على بعض المنتجات، وبعضها لا يُمكن شحنه إلى وجهات دولية.
عند تقديم طلب، سنقوم بتقدير مواعيد الشحن والتسليم بناءً على توفر منتجاتك وخيارات الشحن التي تختارها. قد تظهر تقديرات مواعيد الشحن في صفحة عروض أسعار الشحن، وذلك حسب شركة الشحن التي تختارها.
المنتجات ذات الصلة
المنتجات التي تمت مشاهدتها مؤخرًا
- يؤدي اختيار تحديد إلى تحديث كامل للصفحة.